Cross-link collective: Entangled robotic matter with cohesive motion
Robotic applications increasingly demand systems that are resilient, adaptable, and scalable. One promising routeis through collectives of simple modules, where complex group-level behavior emerges from local interactions. Byomitting fixed topologies and tight coordination, this approach sacrifices predictability and conventional tools forbehaviors inherently optimized through stochastic mechanical interactions. A key challenge is maintaining cohe-sion and functionality without fixed connections and explicit coordination. We introduce the cross-link collective, aphysically entangled robotic system inspired by cross-linking in active gels. Through shape morphing and transiententanglement, individually immobile modules produce sustained collective motion. The mechanically intelligentrobot matter favors chains and phase relationships that reduce joint torques and reconfigures in response to per-turbations. We show that distributed control can be added to this substrate to further enhance cohesion. Leverag-ing weak, reversible connections, the cross-link collective is adaptable, scalable, and fault tolerant, offering insightsto applications from soft matter and robotics
Smarticle 2.0: Design of Scalable, Entangled Smart Matter.

We present a new iteration of smart active matter modules capable of unprecedented 3D entanglement, designed specifically for fabrication and operation at large scales by a range of scientific users. We discuss the benefits of entanglement compared to traditional rigid, lattice formations in active matter and modular robots, and the design which supports low cost, a small and appropriate form factor, low weight, low barrier-of-entry, and ease of operation. We characterize the platform in terms of actuation repeatability and longevity, lifting and holding strength, a number of sensing modalities, and battery life. We demonstrate short and (relatively) long range communication using tactile and acoustic transceivers. We further show exploratory collective behaviors with up to 10 modules, including static entanglement and self disassembly. We hope that this open-source ‘robo-physical’ platform can pave the way for new innovations across the fields of modular robots and active and soft matter.
Simple, Low-Cost Fabrication of Soft Sensors for Shape Reconstruction
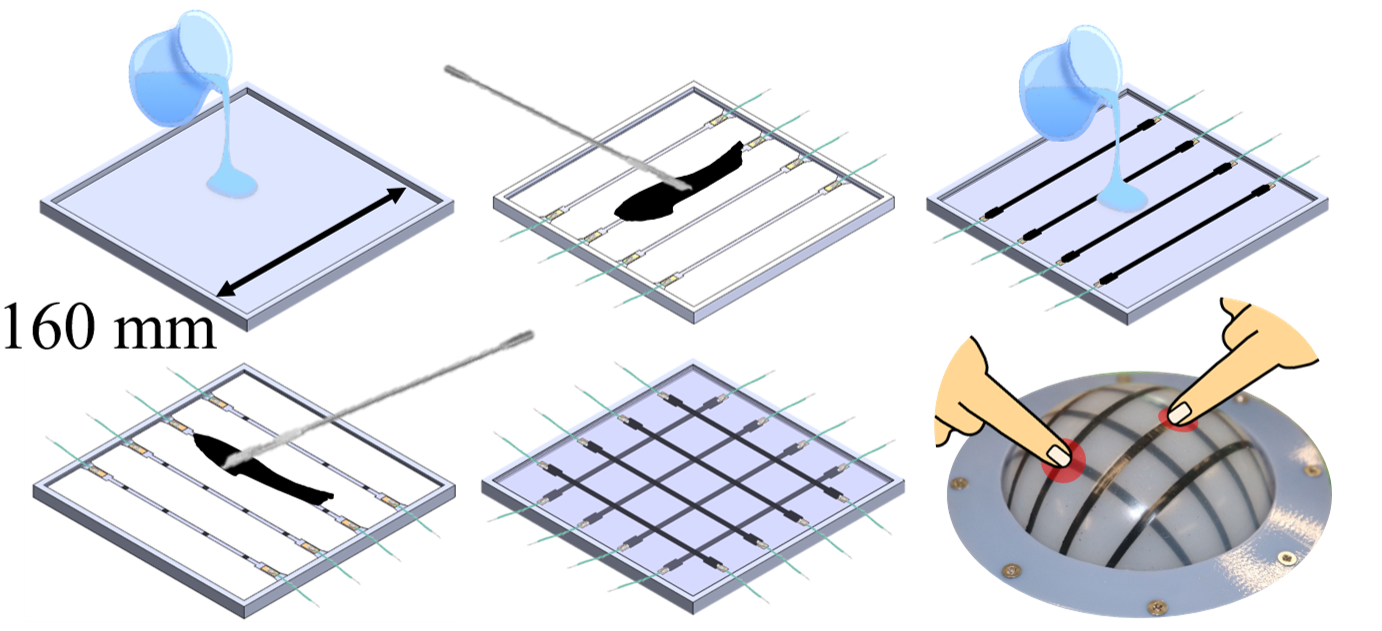
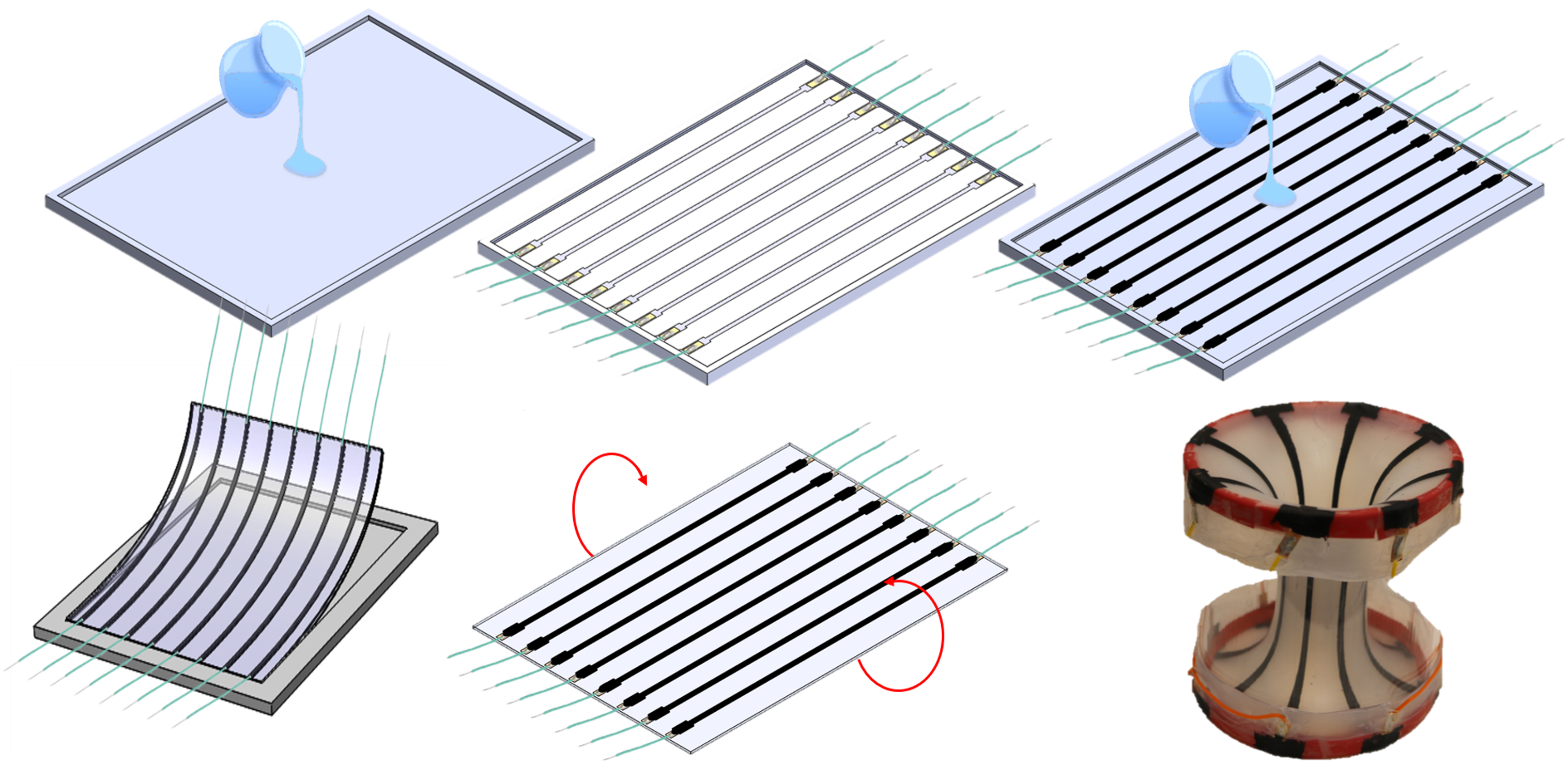

Shape reconstruction by soft sensors may be useful in applications ranging from precision agriculture to haptics and factory automation due to the potential for low-cost fabrication, durable operation, and safe and compliant interaction. Current prevalent techniques, however, require expertise, expensive materials, and high-end processing equipment which limits both their transition to practice and their accessibility to researchers. To address this issue, we present easily accessible, low-cost, and rapid fabrication techniques for soft and resistive carbon composite sensors. We characterize their repeatability and durability in response to stretch up to 135%. We further show how this fabrication technique may be easily customized to two different applications, including a stretchable, tactile interface for passive sensing, and an active, soft pneumatic gripper that can fully encompass an object to reconstruct its shape. We complement these with simple control and analysis, and show how to achieve high relative accuracy, despite the high manufacturing tolerances of the sensors.